今回の記事では電気負荷リスト(Load List)の目的と作成方法について解説します。
プラントの建設プロジェクトでは、設計の早い段階(概念設計~基本設計)において電気負荷リストを作成する必要があります。
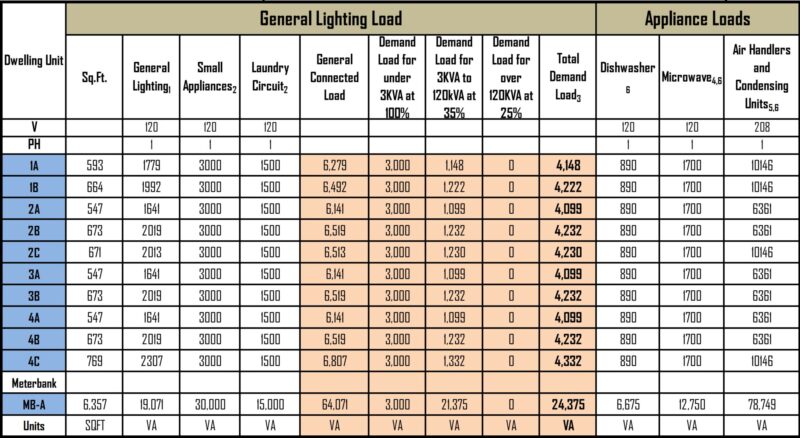
電気負荷リストは、負荷リストとも呼ばれ、電気計装設計部門が受配電設備(変圧器、配電盤やスイッチギアなど)の設計を行うために使用されるリストです。これらの受配電設備の容量は電気負荷リストに基づいて計算されるので、プラントの電気設計において非常に重要な設計図書です。
最終的な責任所掌は電気計装部門となりますが、各機器の情報が不十分な初回発行時ではプロセス設計部門と機器設計部門にて想定値を入力、発行した後、ベンダー情報が揃った段階で電気計装設計部門が完成させることが一般的です。
補足:初回発行時は機器番号順にリストを作成しますが、リストは配電盤毎にシートを分ける必要があります。そのような編集作業は電気計装部門にて行われます。
次項から、電気負荷リストに記載する項目について解説していきます。
合わせて読みたい
・【プラント設計基礎①】基本設計条項(Design Basis)
・【プラント設計基礎②】プロジェクトスペック(Project Specification)
・【プラント設計基礎③】プロセスフロー図(PFD)、マテリアルバランス
・【プラント設計基礎④】運転法案(POD作成)~P&ID作成の準備~
・【プラント設計基礎⑤】P&ID~プラント建設プロジェクトにおける位置づけ~
・【プラント設計基礎⑥】配置図(レイアウト、プロットプラン)~基礎知識と考え方~
・【プラント設計基礎⑦】機器リスト~プラント規模を把握する~
・【プラント設計基礎⑧】設計圧力、設計温度の決定方法の解説
・【プラント設計基礎⑨】P&IDの作成手順の解説~プラント基本設計で記載すること~
・【プラント設計基礎⑩】P&IDの「変更管理」とは?P&ID作成時の注意点の解説
・【プラント設計基礎⑪】プラント建設費の構成と建設契約方式の解説
・プロセスエンジニアって何をする仕事?
・プラントの照明最適化について解説~防爆照明の省エネと安全性向上~
・【保存版】プラント用クレーン・ホイストの設計・選定基準について解説
機器名称
負荷の対象となる機器番号を記載します。
負荷名称
ポンプ、圧縮機のモーターなど、負荷の名称を記載します。
負荷がモーターの場合は「モーター」と明記しておくと後述する入力項目で入力ミスを見つけやすいです。
運転形態
この項目では対象の機器が連続運転、間欠運転、スタンバイか記載します。
スタンバイの機器とは、例えば予備機をを持つポンプで、A号機とB号機があり、A号機が連続運転であればB号機はスタンバイとなります。

運転形態(特に連続運転か間欠運転か)は変圧器や発電設備の容量決定に大きく影響します。
連続運転機器については、負荷の合計がそのまま容量決定に使用されますが、間欠運転機器については一定の係数(例えば30%)をかけた上で合計された容量が使用されます。
定格電圧
対象の機器が低圧負荷か中高負荷かを区別するために、定格電圧を入力します。
低圧(例:380V,400Vなど)、中高圧(3300V,6600V,10000Vなど)の値はプロジェクト毎に異なることに要注意です。(基本設計条項に従います。)

単位は通常Vが使用されます。
電源
ここでは、対象の機器が常用電源か非常用電源のどちらを給電するかを入力します。
この項目では非常用発電機(EDG)の容量決定に使用されます。
負荷種別
対象の機器の負荷形式を記載します。
電気負荷リストにて記載する負荷種別の一例は以下の通りです。
負荷種別の例
・かご形誘導電動機...ポンプなど
・かご形誘導電動機(可逆)...クレーンなど
・かご形誘導電動機(緩始動)
・同期電動機
・電動機駆動弁
・可変速電動機...インバータ駆動のポンプなど
・直流電動機
・給電フィーダ...現場動力盤のあるユニット機器への電源送りなど
・電気ヒーター
電気機器定格容量
この項目では対象の機器の定格容量(Rated Capacity)を入力します。
単位は通常kWが使用されます。
負荷(Load Demand)
この項目では機器、機械設備に要求される負荷(Load Demand)を入力します。設計値(Design Condition)と常用運転値(Normal Operating Condition)の両方が必要となります。
電動機駆動の場合は軸動力(Shaft Power)、ヒーターの場合はヒーターの容量を入力します。
軸動力については、機械効率の考慮する必要があるため、理論軸動力を機械効率で除した値を入力します。
ただし、プラント設計の初期段階では機械効率の情報が不足していることがほとんどのため、推定値を入力せざるを得ないことが多々あります。
このような場合は、電動機の定格容量と軸動力(設計値、常用運転値)との関係式(簡易式)を用いて求めます。
良く使用される簡易式は以下の通りです。
軸動力 (設計値) = 電動機定格負荷 × 0.9
軸動力 (常用運転) = 電動機定格負荷 × 0.8
※搬送機器については軸動力 (常用運転) = 電動機定格負荷 × 0.5
一般的には軸動力の設計負荷に10%程度の余裕を見て電動機が選定されるため、電動機の定格容量に0.9を掛けて軸動力(設計値)を算出します。
また、軸動力の設計値(設計負荷)は常用運転値に10%程度の余裕を見て設計負荷を決めることが多いため、電動機の定格容量に0.8を掛けて軸動力(常用運転値)を算出します。
ただし、コンベアなどの搬送機器は、搬送物が載ったまま再起動することがある機器は、再起動時に通常起動時よりも大きなトルクが必要なので、電動機の定格負荷は常用運転値に50%程度の余裕を見込んでいることが多いため、電動機の定格容量に0.5を掛けて軸動力(常用運転値)を算出します。
なお、負荷の単位は通常kWが使用されます。
効率
前項の電動機の負荷に対応するモーター効率(Motor Efficiency)を入力します。
入力方法は以下の通りです。
・電動機ベンダーから発行される効率カーブからの読み取り
・給電フィーダーや電気ヒーターについては100%を入力
「効率」についても、プラント設計の初期段階では情報が不足しているため推定値を入力します。ただし、実績や他案件で参考となるデータがあればそのデータから類推します。
参考になるデータが無い場合は電動機メーカー(三菱電機や富士電機など)が発行しているカタログ値を引用します。
カタログには200V,400V,3000V,6000Vの電動機の周波数毎(50Hz,60Hz) 及び極数毎(2極,4極,6極,一部8極) の負荷率50%,75%,100%の電動機の効率(力率)データが記載されています。
引用する際は対応する電圧、局数、周波数が予想される負荷率に近いデータを参照しますが、低い側の数値を採用する(例えば予想される負荷が90%の場合、100%のデータではなく75%のデータを採用する)ことに注意が必要です。
また、非防爆低圧電動機(200V, 400V級)で0.75kW以上では電動機効率IE3(プレミアム効率)以上のモーターの使用が義務付けられていることもあるため、メーカーのカタログ値もIE3のデータを採用します。
一方、防爆低圧電動機(安全増防爆や耐圧防爆など)は、対応する防爆構造のデータ採用しますが、防爆構造が未確定の場合は、より効率の低い耐圧防爆のデータを採用します。

なお、「効率」の単位は%ではなく少数2桁を使用することが一般的です。(95%ではなく0.95を使用)
力率
力率はcosθとも表記され、変圧器に容量決定にも使用されるため、重要な情報です。電気負荷リスト上では、誘導電動機(Induction Motor)の負荷に対応する力率(Power Factor)を入力します。
力率は前項の「効率」と同様の方法で入力します。入力の注意点についても「効率」と同様です。
有効電力
有効電力は、モーターが軸動力を出力するのに必要な電力(モーターで実際に消費される電力(Absorbed Power))のことです。
「無効電力」も項で説明しますが、有効電力は受配電設備設計で使用する皮相電力の計算のために必要です。
補足:皮相電力とは、交流機器に供給された電圧と電流の積で、見かけ上の電力です。単位はkVAが使用されます。
この項目では負荷(Load Demand)を効率で除して値を入力します。
なお、有効電力の単位はkWを使用することが一般的です。
無効電力
無効電力は、モータを動かすのに必要だが機械設備では消費されない(仕事には寄与しない)電力のことです。
交流電源では、皮相電力、有効電力、無効電力との間では以下の直角三角形の関係が成り立ちます。力率のcosθは皮相電力と有効電力との比率を意味します。
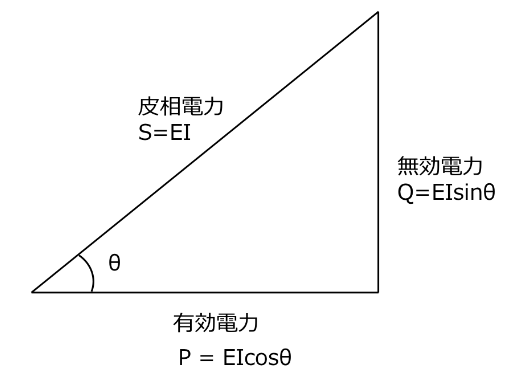
直角三角形の三平方の定理より、
$${皮相電力}^2=有効電力^2 + 無効電力^2$$
の関係が成り立ちます。また、力率の定義より、
$$力率(cosθ)=\frac{有効電力}{皮相電力}$$
となるので、無効電力は
$$無効電力=\sqrt{\biggl(\frac{有効電力}{力率 (cosθ)}\biggl)^2-有効電力^2}$$
で計算することができます。
モーターの定格電流
モーターのベンダーから定格電流の情報があれば入力します。
ただし、プラント設計の初期段階ではそのような情報は無いため、記入する必要はありません。
モーターの始動電流
定格電流と同様、始動電流の情報があれば入力します。
(情報が無い場合は入力不要です。)
電気ヒーターについては定格電流=始動電流とすることが一般的です。
モーター回転数
定速モータの場合は電動機極数(例:2極→2P)を、可変速モータの場合は回転数の幅を入力します。
モーター回転数(同期回転数)と電動機極数、電源周波数の関係は以下の通りです。
$$同期回転数[rpm]=120×\frac{周波数}{極数}$$
ただし、モータの実際の回転数はすべりがあるので同期速度より小さくなることに注意が必要です。
一般的に、電動機極数については以下のような傾向があります。
